The Core Model Trail
In this trail, you will learn some core concepts used within CST in order to understand the basic building blocks required for building your own Cognitive Architecture using CST. Our emphasis will be in understanding the core classes used for building the most elementary kind of Cognitive Architecture. Every cognitive architecture built upon CST will follow a set of guidelines, using just a few classes as support. More sophisticated architectures using additional CST classes might be learned further, following the other trails in our Tutorials page. Once you are able to understand these core concepts and how they are meant to be used using CST classes, you will be able to start building your first Cognitive Architecture using CST.
Basic Notions
The CST toolkit is designed using some basic notions coming from the work of Hofstadter & Mitchell (1994). In their historical "Copycat Architecture", Hofstadter & Mitchell defined their view of a cognitive architecture as based on the work of many micro-agents called codelets, which will be responsible for all kinds of actions in the architecture. Codelets are small pieces of non-blocking code, each of them executing a well defined and simple task. The idea of a codelet is of a piece of code which ideally shall be executed continuously and cyclically, time after time, being responsible for the behavior of a system's independent component running in parallel. The notion of codelet was introduced originally by Hofstadter and Mitchell (1994) and further enhanced by Franklin (1998). The CST architecture is codelet oriented, since all main cognitive functions are implemented as codelets. This means that from a conceptual point of view, any CST-implemented system is a fully parallel asynchronous multi-agent system, where each agent is modeled by a codelet. CST's codelets are implemented much in the same manner as in the LIDA cognitive architecture and largely correspond to the special-purpose processes described in Baar's Global Workspace Theory (Baars 1988). Nevertheless, for the system to work, a kind of coordination must exist among codelets, forming coalitions which by means of a coordinated interaction, are able to implement the cognitive functions ascribed to the architecture. This coordination constraint imposes special restrictions while implementing codelets in a serial computer. In a real parallel system, a codelet would simply be called in a loop, being responsible to implement the behavior of a parallel component. In a serial system like a computer, the overall system might have to share the CPU with its many components. In CST, we use multi-thread to implement this implicit parallelism. Each codelet runs in its own thread.
Figure 1 below illustrates the general conception of a cognitive architecture, according to CST.

Figure 1 - The CST Core
A Mind is modelled in terms of a RawMemory, where many MemoryObjects are stored, and a Coderack, containing a set of Codelets. Codelets might have MemoryObjects as input, and also other MemoryObjects as outputs. Different Codelets might form Coalitions, by sharing the MemoryObjects they use as input and output.
A codelet has two main inputs (which are characterized as In and B in the figure), a local input (In) and a global input (B). The local input is used for the codelet to get information from memory objects, which are available at the Raw Memory. The global input is used for the codelet to get information from the Global Workspace mechanism (Baars & Franklin 2007; 2009). The information coming from the Global Workspace is variable at each instant of time, and usually is related to a summary, an executive filter which select the most relevant piece of information available in memory at each timestep. The two outputs of a codelet are a standard output, which is used to change or create new information in the Raw Memory, and the activation level, which indicates the relevance of the information provided at the output, and is used by the Global Workspace mechanism in order to select information to be destined to the global workspace. Using this Core, the CST toolkit provides different kinds of codelets to perform most of the cognitive functions available at a cognitive architecture, as indicated in figure 2.

Figure 2 - The CST Overall Architecture: Codelets
Also, memory objects are scattered among many different kinds of memories. The Raw Memory is so split into many different memory systems, which are used to store and access different kinds of knowledge. Using the available codelets, different cognitive architectures, using different strategies for perception, attention, learning, planning and behavior generation can be composed in order to perform the role necessary to address a specific control problem. These codelets are constructed according to different techniques in intelligent systems, like neural networks, fuzzy systems, evolutionary computation, rule-based systems, Bayesian networks, etc., which are integrated into a whole control and monitoring system. The definition and choice of a particular cognitive architecture is constructed using a composition of different kinds of codelets, according to the control problem under analysis. Depending on the problem to be addressed, different strategies might be necessary or useful, depending on the problem constraints.
The Main Classes
The main core classes in the CST are presented in the UML diagram of figure 3. Each of them corresponds to one of the concepts presented earlier.
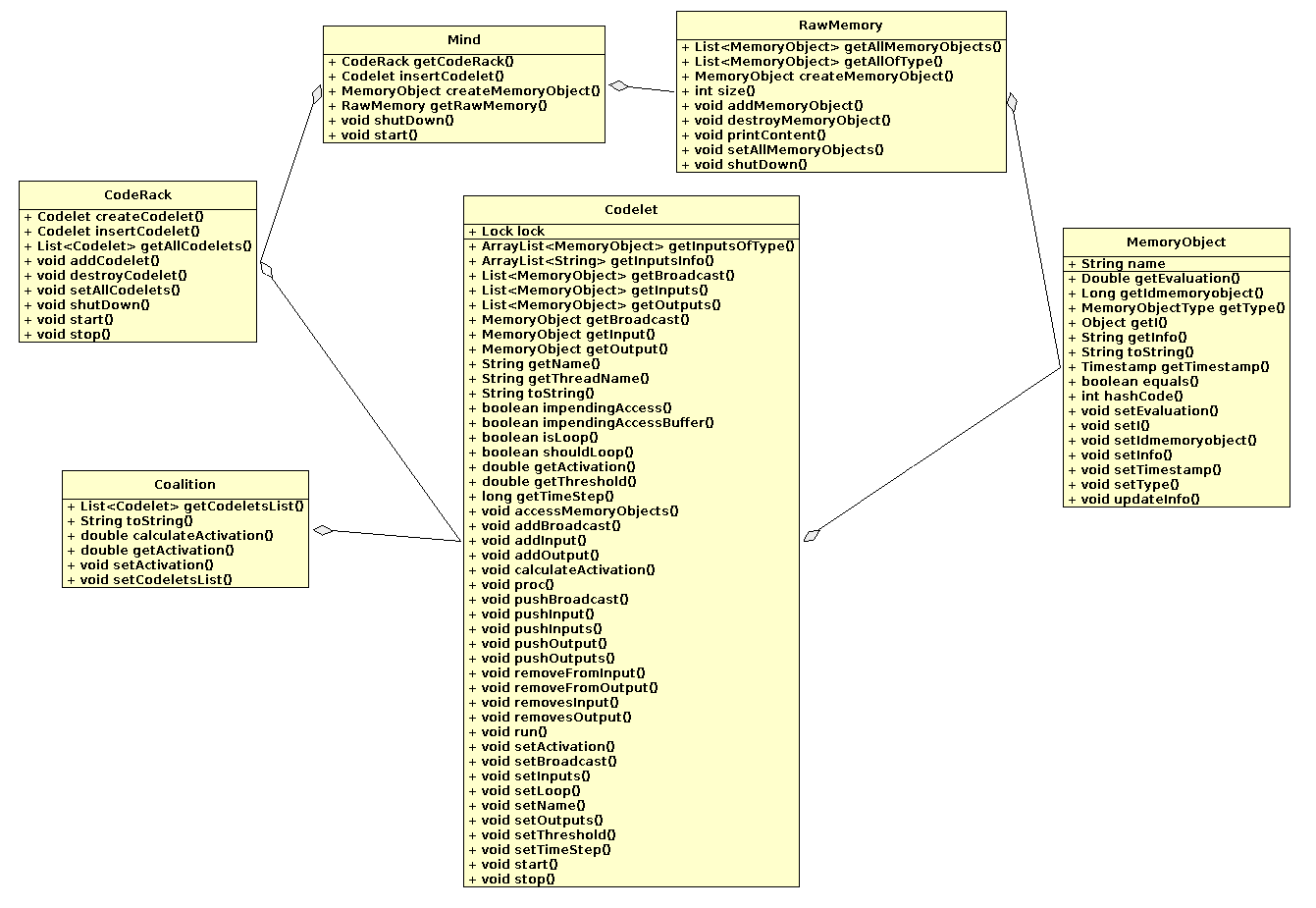
Figure 3 - The Main Core Classes in CST
In order to build a cognitive architecture, the designer might rely basically on those classes. It is possible to build a complete Cognitive Architecture simply by using these main core classes. Basically, the designer might have to create different classes inheriting from the Codelet class, where each codelet is responsible for a small fragment of processing. These codelets will operate on MemoryObjects, affecting other MemoryObjects. The designer might either create an instance of the Mind class, or create a new class inheriting the Mind Class. By doing this, it is creating both a Coderack and a RawMemory. Using the Mind class (or a subclass), the designer might then create all the codelets and MemoryObjects for his/her cognitive architecture and insert them within the Mind. After that, the designer might call the start() method from Mind and the Cognitive Architecture should be operational.
The WS3DApp Application
In this trail, we will be building the WS3DApp, a very simple Cognitive Architecture to control de Robot in the WS3D Virtual Environment. More information about the Virtual Environment, and the source code necessary to build this application can be found in the WS3D Example page. A sketch of the architecture is given in figure 4 below:
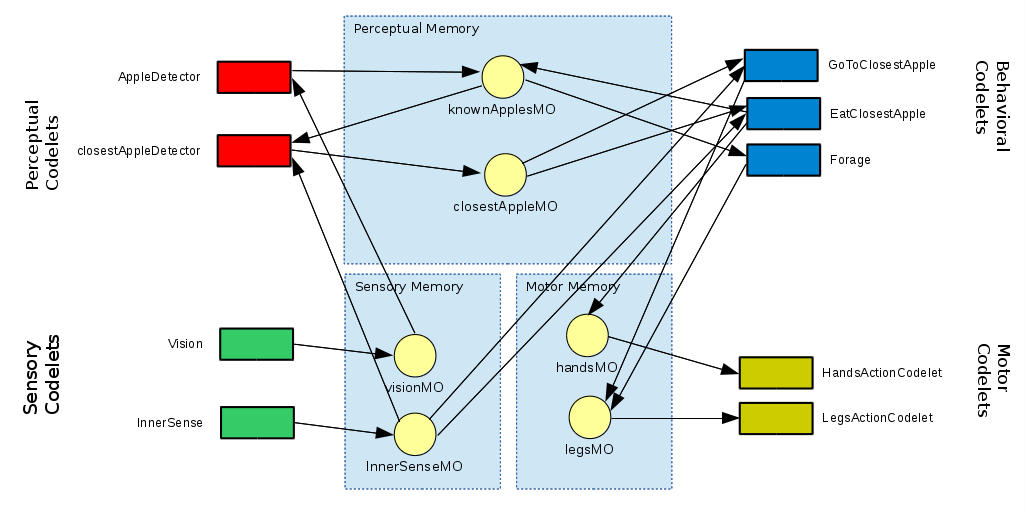
Figure 4 - The Demo Cognitive Architecture for the WS3D Robot Control
This demo architecture is very simple. We have two sensory codelets: Vision and InnerSense. These sensory codelets produce the VisionMO and the InnerSenseMO, the first a memory object containing a list of objects being seen by the creature in its line of sight, and the second a memory object containing self-referencial information, like the agent position, velocity, and other information. We have then two perceptual codelets processing such information. The first perceptual codelet is the AppleDetector codelet. This codelet is responsible for updating the KnownApplesMO memory object, which is a list containing all apples already seen, but not eaten. The ClosestAppleDetector codelet, then, using the information from both KnownApplesMO and InnerSenseMO can then generate the ClosestAppleMO memory object, containing the information regarding the closest apple. Among the behavioral codelets, we have codelets responsible for three different possible behaviors: the GoToClosestApple codelet, the EatClosestApple codelet and the Forage codelet. The Forage codelet will act only when the list of KnowApplesMO is empty. It will create a random walk, by choosing a random destination and providing the LegsMO with the information with this location. The GoToClosestApple codelet will act only when there is something at the ClosestAppleMO, and the InnerSenseMO detects the Robot is far from the closest apple. It then generates information at the LegsMO in order to the Robot to proceed to the location of the closest apple. The EatClosestApple acts only when there is something at the ClosestAppleMO and the InnerSenseMO detects that the Robots position is in a reachable vicinity of the closest apple. It then order the HandsMO memory object, to give an order for the Robot to eat the apple. Finally, the motor codelets process the orders given by HandsMO and LegsMO. The HandsAction codelet check if it is there an order to eat an apple, and sends it to the Virtual Environment, and the LegsActionCodelet checks if there is an order to go to some position and sends it to the Virtual Environment.
Let's take a look on the tree of classes for the WS3DApp application, given in figure 5:
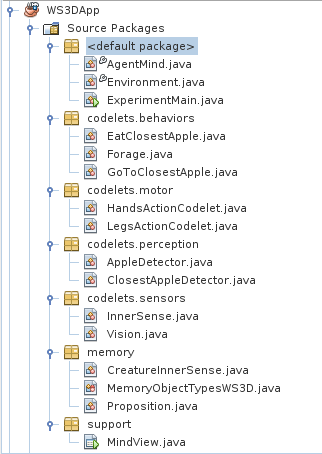
Figure 5 - The Classes Tree for the WS3DApp Application
We have basically a set of packages where we organize our classes in terms of their functionality. In the default package, we have the AgentMind class, where all the architecture is defined, the Environment class, responsible for populating the WS3D environment with a robot and some apples (and increasing new apples from time to time), and the ExperimentMain class, which is the application main class. Then we have a hierarcy of codelets packages, where the different codelets are defined, a memory package with auxiliary classes used within MemoryObjects and a support package, with supporting classes (in this case, the MindView class, which prints out what is within each MemoryObject in the architecture.
The ExperimentMain Class
Let's take a look on the code for the ExperimentMain class (use the sliding bar at the right for viewing the full code):
import java.util.logging.Logger;
public class ExperimentMain {
public Logger logger = Logger.getLogger(ExperimentMain.class.getName());
public ExperimentMain() {
// Create Environment
Environment env=new Environment(); //Creates only a creature and some apples
AgentMind a = new AgentMind(env); // Creates the Agent Mind and start it
}
public static void main(String[] args) {
ExperimentMain em = new ExperimentMain();
}
}This code is very simple. Basically, on the main method the application is initialized, and during the creation of the ExperimentMain object, we create an instance of the Environment class and an instance of the AgentMind class.
The Environment Class
The code for the Environment class can be viewed below:
In this code, we use classes from the WS3DProxy to get access to the WS3D Virtual Environment, reset the World if it was already initialized from a previous simulation (this sets up the Environment back to ground), create 3 apples on selected locations and create a new creature. Then the command c.start() triggers the beginning of the simulation at WS3D.
The AgentMind Class
The code for the AgentMind class can be seen below:
import br.unicamp.cst.core.entities.Codelet;
import br.unicamp.cst.core.entities.MemoryObject;
import br.unicamp.cst.core.entities.Mind;
import codelets.behaviors.EatClosestApple;
import codelets.behaviors.Forage;
import codelets.behaviors.GoToClosestApple;
import codelets.motor.HandsActionCodelet;
import codelets.motor.LegsActionCodelet;
import codelets.perception.AppleDetector;
import codelets.perception.ClosestAppleDetector;
import codelets.sensors.InnerSense;
import codelets.sensors.Vision;
import java.util.ArrayList;
import java.util.Collections;
import java.util.List;
import memory.CreatureInnerSense;
import support.MindView;
import ws3dproxy.model.Thing;
public class AgentMind extends Mind {
private static int creatureBasicSpeed=1;
private static int reachDistance=50;
public AgentMind(Environment env) {
super();
// Declare Memory Objects
MemoryObject legsMO;
MemoryObject handsMO;
MemoryObject visionMO;
MemoryObject innerSenseMO;
MemoryObject closestAppleMO;
MemoryObject knownApplesMO;
//Initialize Memory Objects
legsMO=createMemoryObject("LEGS", "");
handsMO=createMemoryObject("HANDS", "");
List<Thing> vision_list = Collections.synchronizedList(new ArrayList<Thing>());
visionMO=createMemoryObject("VISION",vision_list);
CreatureInnerSense cis = new CreatureInnerSense();
innerSenseMO=createMemoryObject("INNER", cis);
Thing closestApple = null;
closestAppleMO=createMemoryObject("CLOSEST_APPLE", closestApple);
List<Thing> knownApples = Collections.synchronizedList(new ArrayList<Thing>());
knownApplesMO=createMemoryObject("KNOWN_APPLES", knownApples);
// Create and Populate MindViewer
MindView mv = new MindView("MindView");
mv.addMO(knownApplesMO);
mv.addMO(visionMO);
mv.addMO(closestAppleMO);
mv.addMO(innerSenseMO);
mv.addMO(handsMO);
mv.addMO(legsMO);
mv.StartTimer();
mv.setVisible(true);
// Create Sensor Codelets
Codelet vision=new Vision(env.c);
vision.addOutput(visionMO);
insertCodelet(vision); //Creates a vision sensor
Codelet innerSense=new InnerSense(env.c);
innerSense.addOutput(innerSenseMO);
insertCodelet(innerSense); //A sensor for the inner state of the creature
// Create Actuator Codelets
Codelet legs=new LegsActionCodelet(env.c);
legs.addInput(legsMO);
insertCodelet(legs);
Codelet hands=new HandsActionCodelet(env.c);
hands.addInput(handsMO);
insertCodelet(hands);
// Create Perception Codelets
Codelet ad = new AppleDetector();
ad.addInput(visionMO);
ad.addOutput(knownApplesMO);
insertCodelet(ad);
Codelet closestAppleDetector = new ClosestAppleDetector();
closestAppleDetector.addInput(knownApplesMO);
closestAppleDetector.addInput(innerSenseMO);
closestAppleDetector.addOutput(closestAppleMO);
insertCodelet(closestAppleDetector);
// Create Behavior Codelets
Codelet goToClosestApple = new GoToClosestApple(creatureBasicSpeed,reachDistance);
goToClosestApple.addInput(closestAppleMO);
goToClosestApple.addInput(innerSenseMO);
goToClosestApple.addOutput(legsMO);
insertCodelet(goToClosestApple);
Codelet eatApple=new EatClosestApple(reachDistance);
eatApple.addInput(closestAppleMO);
eatApple.addInput(innerSenseMO);
eatApple.addOutput(handsMO);
eatApple.addOutput(knownApplesMO);
insertCodelet(eatApple);
Codelet forage=new Forage();
forage.addInput(knownApplesMO);
forage.addOutput(legsMO);
insertCodelet(forage);
// Start Cognitive Cycle
start();
}
}
It is in this class that the overall Cognitive Architecture is set up. Initially, pay attention that the AgentMind class extends the Mind class from CST. This means it becomes automatically equiped with a RawMemory and a Coderack. Then, we start building up the architecture. We first declare all MemoryObjects and start creating them one by one. The String being passed to the createMemoryObject() method (it is a method of the Mind class, which AgentMind inherits) is tag (a name), which uniquely identifies the MemoryObject, and can be used to recover access to it from the RawMemory, if it is necessary. After creating all MemoryObjects, we then create the MindView, which is a window to trace the contents of all MemoryObjects, and insert in it all MemoryObjects we want to trace. Then we start creating all the codelets in the architecture. We start with the sensor codelets, going through actuator codelets, perception codelets, and behavior codelets. Finally, after the architecture is set up, we start() the cognitive cycle.
The Memory Objects
MemoryObjects are just wrappers for Java objects which hold the valuable information to be used by codelets and to be written by them. In our case, we have the following mapping:
- legsMO = String
- handsMO = String
- visionMO = ArrayList
- innerSenseMO = CreatureInnerSense
- closestAppleMO = Thing
- knownApplesMO = ArrayList
The class Thing is a class from the WS3DProxy package, which provides the connection of our application to the WS3D Virtual Environment. The class CreatureInnerSense is the only memory class which has to be provided by our app.
The CreatureInnerSense Code
Basically, the CreatureInnerSense is just an encapsulation of the inner sense variables for the creature.
package memory;
import java.awt.Polygon;
import ws3dproxy.model.WorldPoint;
public class CreatureInnerSense {
public WorldPoint position;
public double pitch;
public double fuel;
public Polygon FOV;
public String toString() {
if (position != null)
return("Position: "+(int)position.getX()+","+(int)position.getY()+" Pitch: "+pitch+" Fuel: "+fuel);
else
return("Position: null,null"+" Pitch: "+pitch+" Fuel: "+fuel);
}
}The Anatomy of a Codelet
Every codelet in a CST architecture must declare the methods:
- proc()
- accessMemoryObjects()
- calculateActivation()
The following code is a skeleton to be used for creating any kind of codelet
import br.unicamp.cst.core.entities.Codelet;
import br.unicamp.cst.core.entities.MemoryObject;
import java.util.List;
public class MyCodelet extends Codelet {
private MemoryObject mo1;
private MemoryObject mo2;
private List bmos;
/**
* Default constructor
*/
public MyCodelet(){
}
@Override
public void proc() {
// Execute some processing
// can use mo1, mo2 and bmos here
}
@Override
public void accessMemoryObjects() {
// Capture the MemoryObjects to be used in proc()
// input, output or broadcast
mo1 = this.getInput("LABEL1");
mo2 = this.getOutput("LABEL2");
bmos = this.getBroadcast();
}
@Override
public void calculateActivation() {
// In the case of using a consciousness mechanism
// the codelet should calculate its activation.
// The codelet with biggest activation value will
// be selected to broadcast its output MemoryObjects
// to all other codelets in the system
}
}
Let's take a look on each of these methods. The first one which is called every time the codelet is timed is the accessMemoryObjects() method. In this method, all the memory objects to be used in the proc() method might be declared and captured using the getInput, getOutput or getBroadcast methods. There are different versions of these methods available in the Codelet class. In the example, the input and the output are capture by means of their labels which were declared in their initialization at the AgentMind class.
The Behavior Codelets
In our application we have 3 behavioral codelets:
- GoToClosestApple
- EatClosestApple
- Forage
Let's take a look in the code for each of these classes:
The GoToClosestApple Codelet
The GoToClosestApple codelet basically reads information from the closestAppleMO, holding the position of the closest apple, the selfInfoMO, which bring the information from the inner sense of the creature, and write a command for the legs in the legsMO. This command is written with the help of JSON.
package codelets.behaviors;
import java.awt.Point;
import java.awt.geom.Point2D;
import org.json.JSONException;
import org.json.JSONObject;
import br.unicamp.cst.core.entities.Codelet;
import br.unicamp.cst.core.entities.MemoryObject;
import memory.CreatureInnerSense;
import ws3dproxy.model.Thing;
public class GoToClosestApple extends Codelet {
private MemoryObject closestAppleMO;
private MemoryObject selfInfoMO;
private MemoryObject legsMO;
private int creatureBasicSpeed;
private double reachDistance;
public GoToClosestApple(int creatureBasicSpeed, int reachDistance) {
this.creatureBasicSpeed=creatureBasicSpeed;
this.reachDistance=reachDistance;
}
@Override
public void accessMemoryObjects() {
closestAppleMO=this.getInput("CLOSEST_APPLE");
selfInfoMO=this.getInput("INNER");
legsMO=this.getOutput("LEGS");
}
@Override
public void proc() {
// Find distance between creature and closest apple
//If far, go towards it
//If close, stops
Thing closestApple = (Thing) closestAppleMO.getI();
CreatureInnerSense cis = (CreatureInnerSense) selfInfoMO.getI();
if(closestApple != null)
{
double appleX=0;
double appleY=0;
try {
appleX = closestApple.getX1();
appleY = closestApple.getY1();
} catch (Exception e) {
e.printStackTrace();
}
double selfX=cis.position.getX();
double selfY=cis.position.getY();
Point2D pApple = new Point();
pApple.setLocation(appleX, appleY);
Point2D pSelf = new Point();
pSelf.setLocation(selfX, selfY);
double distance = pSelf.distance(pApple);
JSONObject message=new JSONObject();
try {
if(distance>reachDistance){ //Go to it
message.put("ACTION", "GOTO");
message.put("X", (int)appleX);
message.put("Y", (int)appleY);
message.put("SPEED", creatureBasicSpeed);
}else{//Stop
message.put("ACTION", "GOTO");
message.put("X", (int)appleX);
message.put("Y", (int)appleY);
message.put("SPEED", 0.0);
}
legsMO.updateI(message.toString());
} catch (JSONException e) {
e.printStackTrace();
}
}
}//end proc
@Override
public void calculateActivation() {
}
}
The EatClosestApple Codelet
The EatClosestApple codelet basically uses the information from the innerSenseMO to get the creature's position, and if the creature is just besides the apple, send the command to hands to eat it. After that, it destroys its internal reference to the apple from known apples.
The Forage Codelet
The Forage codelet basically checks if there is no known apples. If there is no known apples, it sends the command to forage to the legs actuator.
package codelets.behaviors;
import br.unicamp.cst.core.entities.Codelet;
import br.unicamp.cst.core.entities.MemoryObject;
import java.util.List;
import org.json.JSONException;
import org.json.JSONObject;
import ws3dproxy.model.Thing;
public class Forage extends Codelet {
private MemoryObject knownMO;
private List<Thing> known;
private MemoryObject legsMO;
public Forage(){
}
@Override
public void proc() {
known = (List<Thing>) knownMO.getI();
if (known.size() == 0) {
JSONObject message=new JSONObject();
try {
message.put("ACTION", "FORAGE");
legsMO.updateI(message.toString());
} catch (JSONException e) {
e.printStackTrace();
}
}
}
@Override
public void accessMemoryObjects() {
knownMO = this.getInput("KNOWN_APPLES");
legsMO=this.getOutput("LEGS");
}
@Override
public void calculateActivation() {
}
}
The Motor Codelets
In our demo app, we have 2 motor codelets:
- HandsActionCodelet
- LegsActionCodelet
Let's take a look on the code for these 2 classes
The HandsActionCodelet Code
The HadsActionCodelet is an actuator responsible for eating, picking or burying things at the environment. If it receives any of these commands, it executes it, sending the corresponding command to the server.
package codelets.motor;
import org.json.JSONException;
import org.json.JSONObject;
import br.unicamp.cst.core.entities.Codelet;
import br.unicamp.cst.core.entities.MemoryObject;
import java.util.Random;
import ws3dproxy.model.Creature;
public class HandsActionCodelet extends Codelet{
private MemoryObject handsMO;
private String previousHandsAction="";
private Creature c;
private Random r = new Random();
public HandsActionCodelet(Creature nc) {
c = nc;
}
@Override
public void accessMemoryObjects() {
handsMO=this.getInput("HANDS");
}
public void proc() {
String command = (String) handsMO.getI();
if(!command.equals("") && (!command.equals(previousHandsAction))){
JSONObject jsonAction;
try {
jsonAction = new JSONObject(command);
if(jsonAction.has("ACTION") && jsonAction.has("OBJECT")){
String action=jsonAction.getString("ACTION");
String objectName=jsonAction.getString("OBJECT");
if(action.equals("PICKUP")){
try {
c.putInSack(objectName);
} catch (Exception e) {
}
System.out.println("Sending Put In Sack command to agent:****** "+objectName+"**********");
}
if(action.equals("EATIT")){
try {
c.eatIt(objectName);
} catch (Exception e) {
}
System.out.println("Sending Eat command to agent:****** "+objectName+"**********");
}
if(action.equals("BURY")){
try {
c.hideIt(objectName);
} catch (Exception e) {
}
System.out.println("Sending Bury command to agent:****** "+objectName+"**********");
}
}
} catch (JSONException e) {
e.printStackTrace();
}
}
previousHandsAction = (String) handsMO.getI();
}//end proc
@Override
public void calculateActivation() {
}
}The LegsActionCodelet Code
The LegsActionCodelet is an actuator responsible for the creature mobility. It can goes to a specific point given in a command, or decides to rotate, in order to look for apples.
package codelets.motor;
import org.json.JSONObject;
import br.unicamp.cst.core.entities.Codelet;
import br.unicamp.cst.core.entities.MemoryObject;
import java.util.Random;
import org.json.JSONException;
import ws3dproxy.model.Creature;
public class LegsActionCodelet extends Codelet{
private MemoryObject legsActionMO;
private double previousTargetx=0;
private double previousTargety=0;
private String previousLegsAction="";
private Creature c;
double old_angle = 0;
int k=0;
public LegsActionCodelet(Creature nc) {
c = nc;
}
@Override
public void accessMemoryObjects() {
legsActionMO=this.getInput("LEGS");
}
@Override
public void proc() {
String comm = (String) legsActionMO.getI();
if (comm == null) comm = "";
Random r = new Random();
if(!comm.equals("") ){
try {
JSONObject command=new JSONObject(comm);
if (command.has("ACTION")) {
int x=0,y=0;
String action=command.getString("ACTION");
if(action.equals("FORAGE")){
try {
x = r.nextInt(600);
y = r.nextInt(800);
if (!comm.equals(previousLegsAction))
System.out.println("Sending Forage command to agent:****** ("+x+","+y+") **********");
c.rotate(5);
//c.moveto(1,x,y);
} catch (Exception e) {
e.printStackTrace();
}
}
else if(action.equals("GOTO")){
if (!comm.equals(previousLegsAction)) {
double speed=command.getDouble("SPEED");
double targetx=command.getDouble("X");
double targety=command.getDouble("Y");
if (!comm.equals(previousLegsAction)) System.out.println("Sending move command to agent: ["+targetx+","+targety+"]");
try {
c.moveto(speed, targetx, targety);
} catch(Exception e) {
e.printStackTrace();
}
previousTargetx=targetx;
previousTargety=targety;
}
}else{
System.out.println("Sending stop command to agent");
try {
c.moveto(0,0,0);
} catch(Exception e) {
e.printStackTrace();
}
}
}
previousLegsAction=comm;
k++;
} catch (JSONException e) {e.printStackTrace();}
}
}//end proc
@Override
public void calculateActivation() {
}
}
The Perception Codelets
In our app, we have 2 Perception Codelets:
- AppleDetector
- ClosestAppleDetector
Let's take a look on the code of these classes
The AppleDetector Code
The AppleDetector codelet basically scans the visual range sensor, and in finding an apple includes it in the list of known apples.
package codelets.perception;
import br.unicamp.cst.core.entities.Codelet;
import br.unicamp.cst.core.entities.MemoryObject;
import java.util.Collections;
import java.util.List;
import java.util.concurrent.CopyOnWriteArrayList;
import ws3dproxy.model.Thing;
public class AppleDetector extends Codelet {
private MemoryObject visionMO;
private MemoryObject knownApplesMO;
public AppleDetector(){
}
@Override
public void accessMemoryObjects() {
synchronized(this) {
this.visionMO=this.getInput("VISION");
}
this.knownApplesMO=this.getOutput("KNOWN_APPLES");
}
@Override
public void proc() {
CopyOnWriteArrayList<Thing> vision;
List<Thing> known;
synchronized (visionMO) {
vision = new CopyOnWriteArrayList((List<Thing>) visionMO.getI());
known = Collections.synchronizedList((List<Thing>) knownApplesMO.getI());
synchronized(vision) {
for (Thing t : vision) {
boolean found = false;
synchronized(known) {
CopyOnWriteArrayList<Thing> myknown = new CopyOnWriteArrayList<>(known);
for (Thing e : myknown)
if (t.getName().equals(e.getName())) {
found = true;
break;
}
if (found == false && t.getName().contains("PFood") && !t.getName().contains("NPFood")) known.add(t);
}
}
}
}
}// end proc
@Override
public void calculateActivation() {
}
}//end classThe ClosestAppleDetector Code
The ClosestAppleDetector codelet basically scans the list of known apples and actualize the closestAppleMO, based on the current position for the creature, detecting the closest apple.
package codelets.perception;
import br.unicamp.cst.core.entities.Codelet;
import br.unicamp.cst.core.entities.MemoryObject;
import java.util.Collections;
import memory.CreatureInnerSense;
import java.util.List;
import java.util.concurrent.CopyOnWriteArrayList;
import ws3dproxy.model.Thing;
public class ClosestAppleDetector extends Codelet {
private MemoryObject knownMO;
private MemoryObject closestAppleMO;
private MemoryObject innerSenseMO;
private List<Thing> known;
public ClosestAppleDetector() {
}
@Override
public void accessMemoryObjects() {
this.knownMO=this.getInput("KNOWN_APPLES");
this.innerSenseMO=this.getInput("INNER");
this.closestAppleMO=this.getOutput("CLOSEST_APPLE");
}
@Override
public void proc() {
Thing closest_apple=null;
known = Collections.synchronizedList((List<Thing>) knownMO.getI());
CreatureInnerSense cis = (CreatureInnerSense) innerSenseMO.getI();
synchronized(known) {
if(known.size() != 0){
//Iterate over objects in vision, looking for the closest apple
CopyOnWriteArrayList<Thing> myknown = new CopyOnWriteArrayList<>(known);
for (Thing t : myknown) {
String objectName=t.getName();
if(objectName.contains("PFood") && !objectName.contains("NPFood")){ //Then, it is an apple
if(closest_apple == null){
closest_apple = t;
}
else {
double Dnew = calculateDistance(t.getX1(), t.getY1(), cis.position.getX(), cis.position.getY());
double Dclosest= calculateDistance(closest_apple.getX1(), closest_apple.getY1(), cis.position.getX(), cis.position.getY());
if(Dnew<Dclosest){
closest_apple = t;
}
}
}
}
if(closest_apple!=null){
if(closestAppleMO.getI() == null || !closestAppleMO.getI().equals(closest_apple)){
closestAppleMO.setI(closest_apple);
}
}else{
//couldn't find any nearby apples
closest_apple = null;
closestAppleMO.setI(closest_apple);
}
}
else { // if there are no known apples closest_apple must be null
closest_apple = null;
closestAppleMO.setI(closest_apple);
}
}
}//end proc
@Override
public void calculateActivation() {
}
private double calculateDistance(double x1, double y1, double x2, double y2) {
return(Math.sqrt(Math.pow(x1-x2, 2)+Math.pow(y1-y2, 2)));
}
}
The Sensor Codelets
In our app, we have 2 Sensor Codelets:
- InnerSense
- Vision
Let's take a look on the code of these classes:
The InnerSense Code
The InnerSense codelet, is a sensor codelet which basically reads the creature's inner sense and update the innerSenseMO with the newest information.
package codelets.sensors;
import br.unicamp.cst.core.entities.Codelet;
import br.unicamp.cst.core.entities.MemoryObject;
import memory.CreatureInnerSense;
import ws3dproxy.model.Creature;
public class InnerSense extends Codelet {
private MemoryObject innerSenseMO;
private Creature c;
private CreatureInnerSense cis;
public InnerSense(Creature nc) {
c = nc;
}
@Override
public void accessMemoryObjects() {
innerSenseMO=this.getOutput("INNER");
cis = (CreatureInnerSense) innerSenseMO.getI();
}
public void proc() {
cis.position = c.getPosition();
cis.pitch = c.getPitch();
cis.fuel = c.getFuel();
cis.FOV = c.getFOV();
}
@Override
public void calculateActivation() {
}
}
The Vision Code
The Vision codelet is a sensor which basically uses the WS3DProxy routines to get a list of apples under the current view of the creature.
package codelets.sensors;
import br.unicamp.cst.core.entities.Codelet;
import br.unicamp.cst.core.entities.MemoryObject;
import java.util.List;
import ws3dproxy.model.Creature;
import ws3dproxy.model.Thing;
/**
* Vision codelet is responsible for getting vision information
* from the environment. It returns all objects in the visual field
* an its properties.
*/
public class Vision extends Codelet{
private MemoryObject visionMO;
private Creature c;
public Vision(Creature nc) {
c = nc;
}
@Override
public void accessMemoryObjects() {
visionMO=this.getOutput("VISION");
}
@Override
public void proc() {
c.updateState();
synchronized (visionMO) {
List lt = c.getThingsInVision();
visionMO.setI(lt);
}
}//end proc()
@Override
public void calculateActivation() {
}
}// class endConclusion
By concluding this trail, you have studied the Core basics of CST. Most cognitive architectures built with the aid of CST will require just these features shown in this trail. In the next trails, more sophisticated mechanisms will be described and exercized.
References
(Baars 1988) Bernard J. Baars. A Cognitive Theory of Consciousness. Cambridge University Press, 1988.
(Baars & Franklin 2007) Bernard J. Baars and Stan Franklin. An Architectural Model of Conscious and Unconscious Brain Functions: Global Workspace Theory and IDA. Neural Networks, 20:955–961, 2007.
(Baars & Franklin 2009) B.J. Baars and S. Franklin. Consciousness is Computational: The LIDA model of Global Workspace Theory. International Journal of Machine Consciousness, 01(0101):23, 2009.
(Hofstadter & Mitchell 1994) D. Hofstadter and M. Mitchell. The Copycat Project: A Model of Mental Fluidity and Analogy-making, pages 205–268. BasicBooks, 10, East 53rd Street, New York, NY 10022-5299, 1994.